














Acteon’s Data and Robotics division provides a suite of smart solutions for the entire lifecycle of an asset, including advanced geotechnical and geophysical site investigation, surveying, subsea electronics and robotics, and asset integrity monitoring.
Acteon’s Engineering, Moorings and Foundations division delivers a complete service from initial concept engineering through design, fabrication, and on to marine installation.

Acteon’s Energy Services division supports oil and gas and other offshore energy sectors. We bring bespoke solutions to maximise an asset’s performance, often towards the end of its production life through structural improvements and corrosion protection retrofitting.
SEGMENTS AND BUSINESS UNITS






Our Portfolio
Unrivalled expertise across marine energy and infrastructure services













THE INDUSTRIES WE SERVE

Acteon drives down costs for operators by optimising design and installation activities and improving scheduling and resource utilisation. We have the expertise to support the development of large structures in deep water, including floating installations. And provide baseline environmental surveys so that projects can establish appropriate controls for environmental protection.

Acteon has supported the oil and gas industry for decades by delivering cost efficiencies and project timeline savings on large and complex projects in all water depths. Our services include pre-development and front-end-engineering, development drilling services, foundations, moorings, production asset installation, asset integrity monitoring and management, field life extension and decommissioning.

Acteon provides nearshore construction services for marine facilities; these range from geophysical and geotechnical surveys and engineering services to piledriving, foundation work and mooring. Our integrated solutions and domain knowledge help customers to reduce project footprints, increase efficiency, and significantly lower the total cost of infrastructure construction and installation.

Acteon is at the forefront of the offshore industry’s drive to reduce costs and increase operational efficiency. We define and develop targeted integrated offerings within each industry we serve to allow clients to overcome unresolved challenges associated with asset ownership across all phases of the lifecycle.

Operations, maintenance and integrity services track record
Acteon has a comprehensive range of in-house services and technologies for surveying and inspecting fixed and floating balance-of-plant assets.
FEATURED PRODUCT: THE NX2 PLATFORM
Designed to allow clients to optimise their operations, NX2 is a comprehensive solution that transforms raw data into actionable insights. The NX2 Platform is more than just software; it is a powerful ecosystem that supports your entire data journey.
NX2 Platform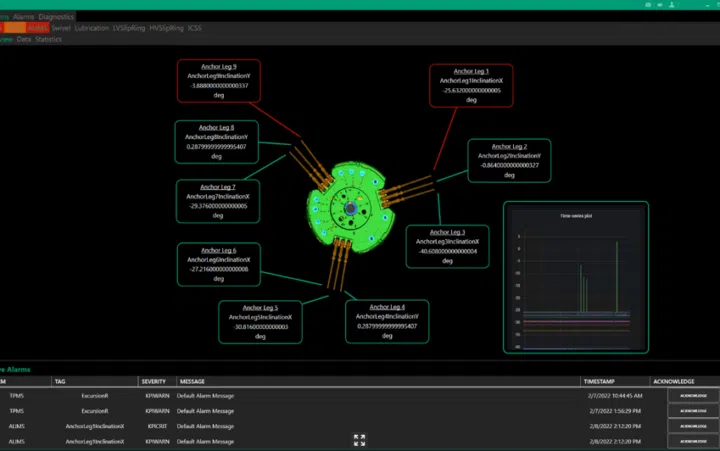
LATEST FROM ACTEON

-
LDD provides drilling services to George Leslie on the Kennacraig port upgrade project
 LDD, a brand in marine energy and infrastructure services company Acteon, was awarded a contract by George Leslie to perform piling works on the Kennacraig ferry terminal in...
LDD, a brand in marine energy and infrastructure services company Acteon, was awarded a contract by George Leslie to perform piling works on the Kennacraig ferry terminal in... -
Takeaways from IPF 2024
 The International Partnering Forum took place in New Orleans, Louisiana from April 22-25, 2024 and was the stage of several major announcements that shed a positive light on...
The International Partnering Forum took place in New Orleans, Louisiana from April 22-25, 2024 and was the stage of several major announcements that shed a positive light on...